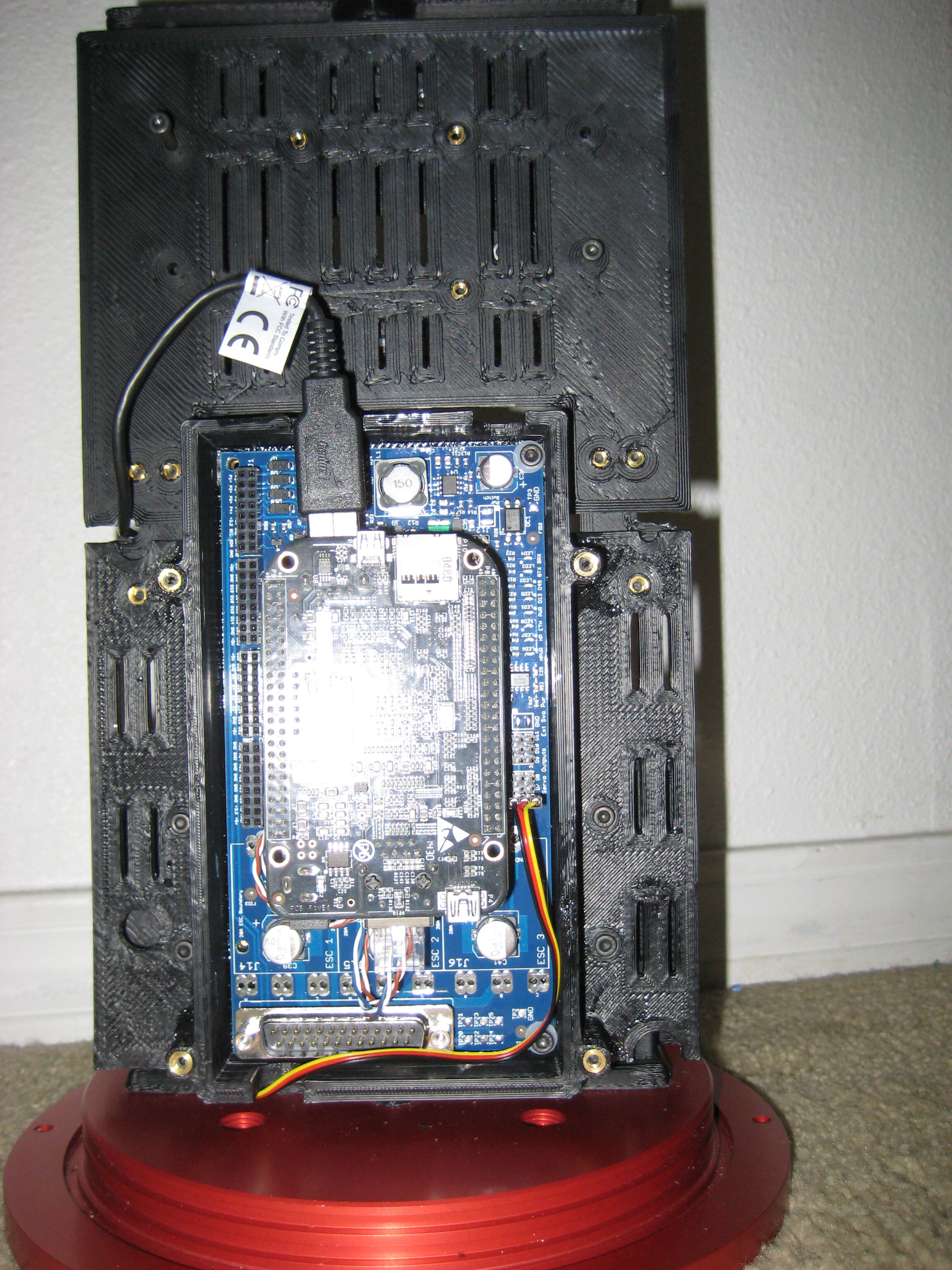
The Brain is mostly done! It’s basically a 3d printer controller with a beaglebone black attached on top. All the black plastic bits were made on my TAZ. 40 heat set inserts, about 2 and a half pounds plastic, one servo and all of the M3 bolts in Washington.



what an amazing project!
Back assembled after Paint. The Front pressure hull is off in these shots, but you can see the internal structure nicely, along with the new “go up and down” motor mount. I guess it would be the elevator in a conventional submarine.
Printing the second to last parts right now for the frame, nose caps for the skids and endcaps for all the exposed sharp pointy bits of extrusion. I still need to figure out a mount for the inertial movement Unit (IMU) sensor pod, and a weight holder/ emergency ascent thingy.



Next week is the first no electronics dunk test. The last of the electrical components and the final motor should be here by then hopefully and I can take it for a swim
SWim test - No electronics. Everything looks good, I just have to fix an issue with the electronics plate and then wire everything up and we’re good to dive!






Such a great idea!
Incredible work.
I’m trying to build an underwater sub powered by arduino for my pool. Project for my daughter and I  but I’m struggling to find waterproof propulsion which you obviously have cracked. Would you mind sharing details on the thruster / guards you’ve pictured?
but I’m struggling to find waterproof propulsion which you obviously have cracked. Would you mind sharing details on the thruster / guards you’ve pictured?
Thank you!
Sure, no problem! Those are Bluerobotics T-100 and T-200 thrusters, which are available here https://www.bluerobotics.com/store/thrusters/t100-thruster/
The guards are my design, which you can download and print from here if you like: http://www.thingiverse.com/thing:1498338
The Bluerobotics thrusters work great, and are worth the money if you are planning on going to depth, but for a pool specific project you might want to check out the sump pump based alternatives which you can see how to do here: http://www.homebuiltrovs.com/howtobilgeconversion.html The bilge pumps have the advantage of being inexpensive, though they don’t have nearly the same amount of thrust. You can wire those into a brushed motor speed controller and plug that into an arduino servo input off I2C for example.
If you haven’t already made a pressure hull, the bluerobotics guys also have a new line of pressure housings and cable passthroughs that are worth looking at. https://www.bluerobotics.com/store/watertight-enclosures/wte4-asm-r1/#configuration . They are a bit more than making a PVC only housing, but you can also buy just the ends and the domes there and use standard PVC or get some cast acrylic tube from Mcmaster Carr.
If you haven’t already sourced your Arduino board, also check out the OpenROV hardware. Adds a Raspberry PI board for additional control and camera / sensor feeds.
Piercet, fantastic info. Thank you very much!
The Bluerobotics offerings combined with your intake guards are brilliant, but might be above my budget. I think the sump pump is a great fit and will start there, and see if I can incorporate your guards (I fear for the fingers of my daughters friends… my girl is smart enough to avoid such catastrophe )
The open ROV… thats some next level stuff, but looks like you’ll give them a run.
Thanks again for sharing!