I haven’t actually printed this as such yet, but it’s in the works, and the design files are mostly done. Parts are on the way, etc. This is my entry into the Reddit r/3dprinting “best 3d printed machine” contest (http://www.reddit.com/r/3Dprinting/comments/2ety9p/makers_tool_works_3d_printing_contest/) which by the way needs more entrants. But at any rate, It’s going to be printed on my TAZ, and I’ll post the “in progress” stuff here. Now that my AO-10x upgrades are just about done, I need a new project heh.
The plan at the moment for the one I am building will be controlled via a tether. Someone with more robotics experiance than myself could probably make an autonomous one.
Add a vacuum hose and you could use it to clean swimming pools.
Add a couple cameras and lights and someone on the surface could “swim” with their scuba-diving buddies.
Add a grappling arm/hand and you could search for treasure. Gold dubloons to starboard Captain!!!
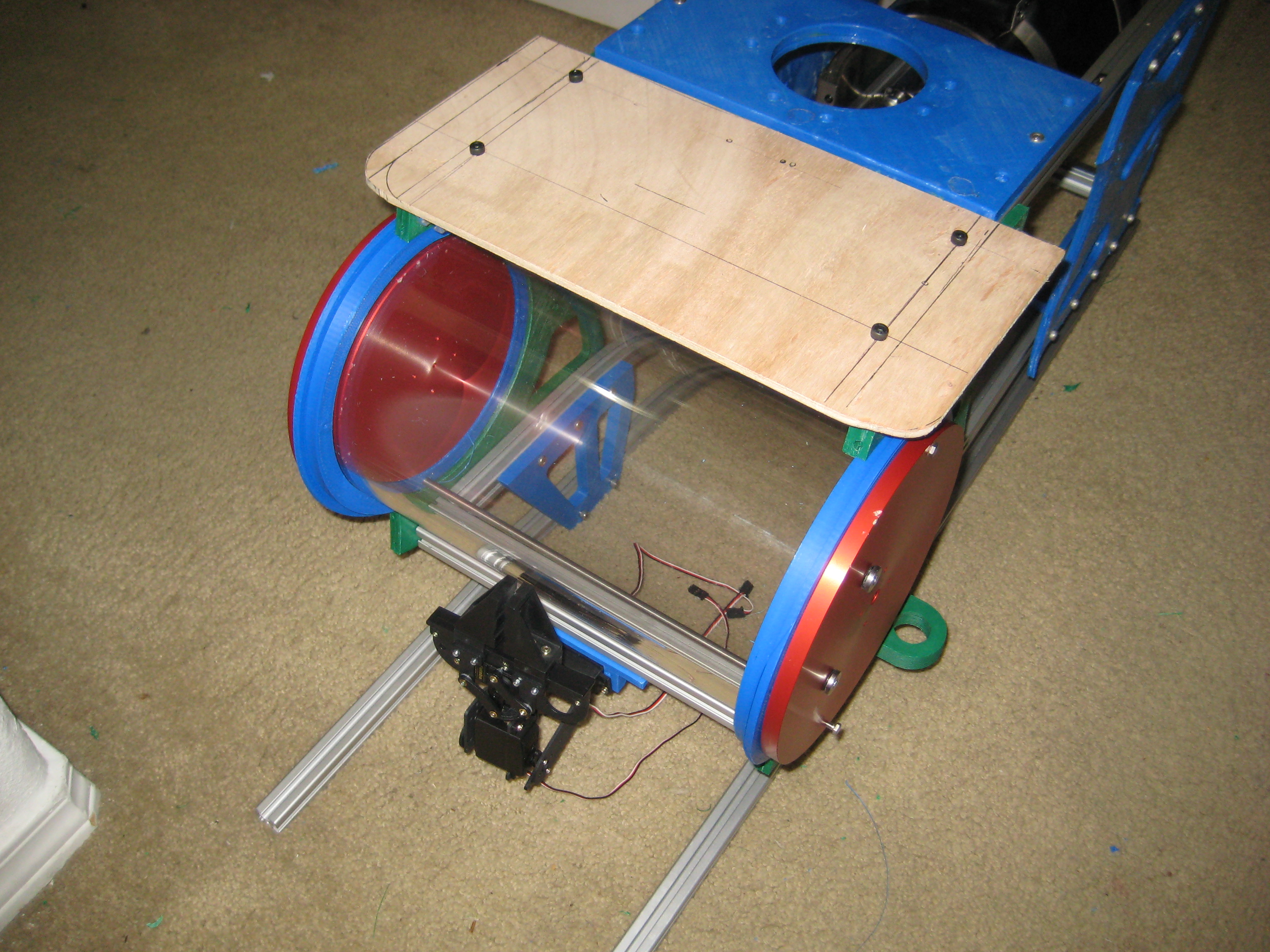
Lights and camera will be located inside the 8" acrylic tube, with mounts for auxiliary lights on the top as needed. The robot gripper arm thingy will mount on that little grey mounty spot on the side of the frame unless I move it underneith. I hadn’t thought of any kind of vaccume hose mount, but I could certanly add one!
I may have to shrink the whole thing slightly. The peices are small enough to just bairly fit on the Taz bed, but not allow for a runout line around or any brim. Still is pretty big though heh.
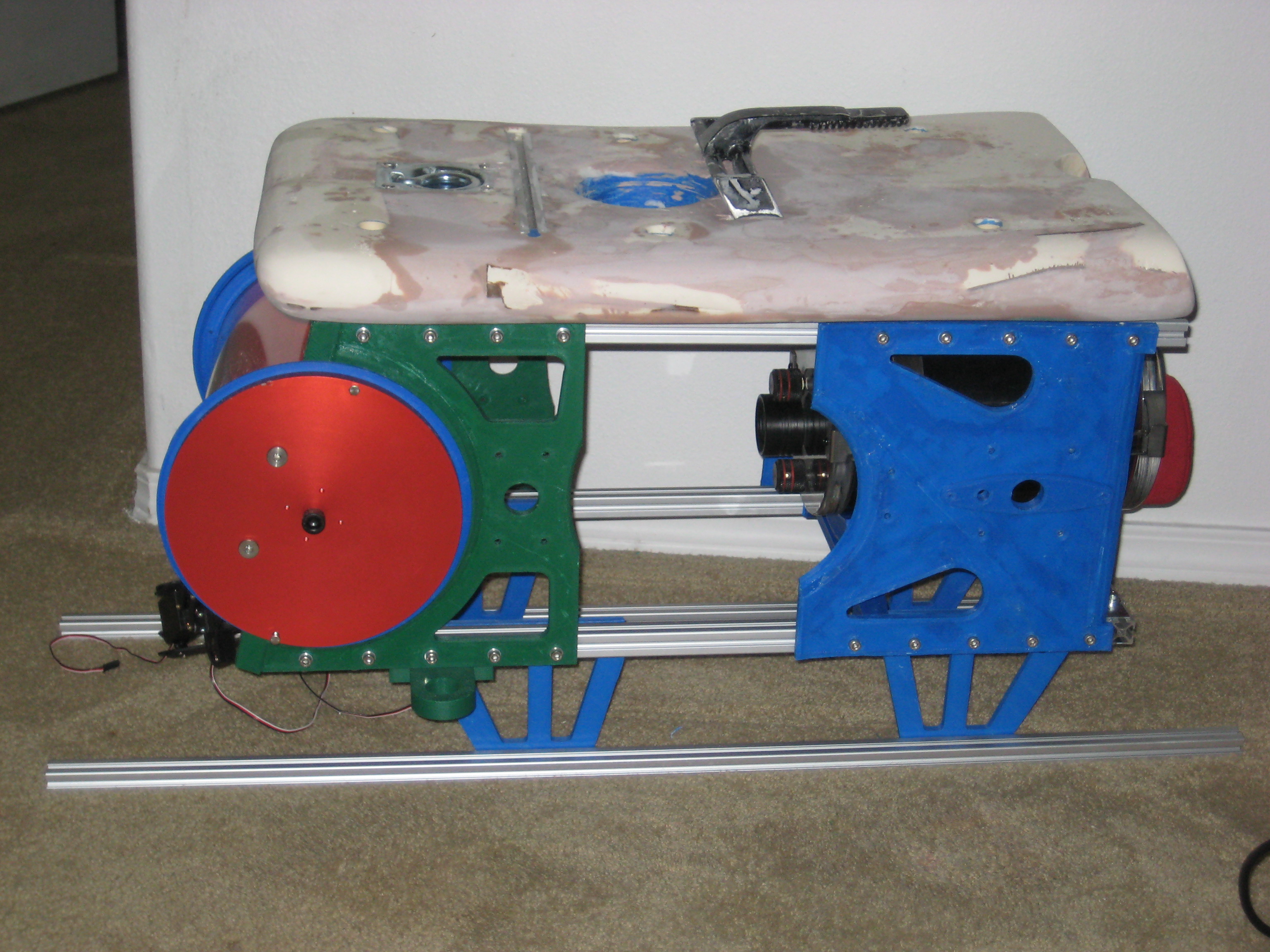
Here’s a couple of progress pictures. I’ve started construction of the ROV float, and several of the major pieces are printed and test fit. The skids are off in these pictures several inches, just ignore that for now though heh. Next prints will be the two large side panels. The top structure is getting a bit of a redesign to accommodate the float base and the secondary pressure hull easier (the secondary pressure hull is an old underwater camera housing repurposed. Eventually that will house the robot arm control module, a rear camera, and half the batteries.
The thrusters themselves will start arriving over the next few months. Electronics will probably end up being a supplemental Robot arm controller coupled with a regular OpenROV control board. The robot arm itself is also on it’s way.
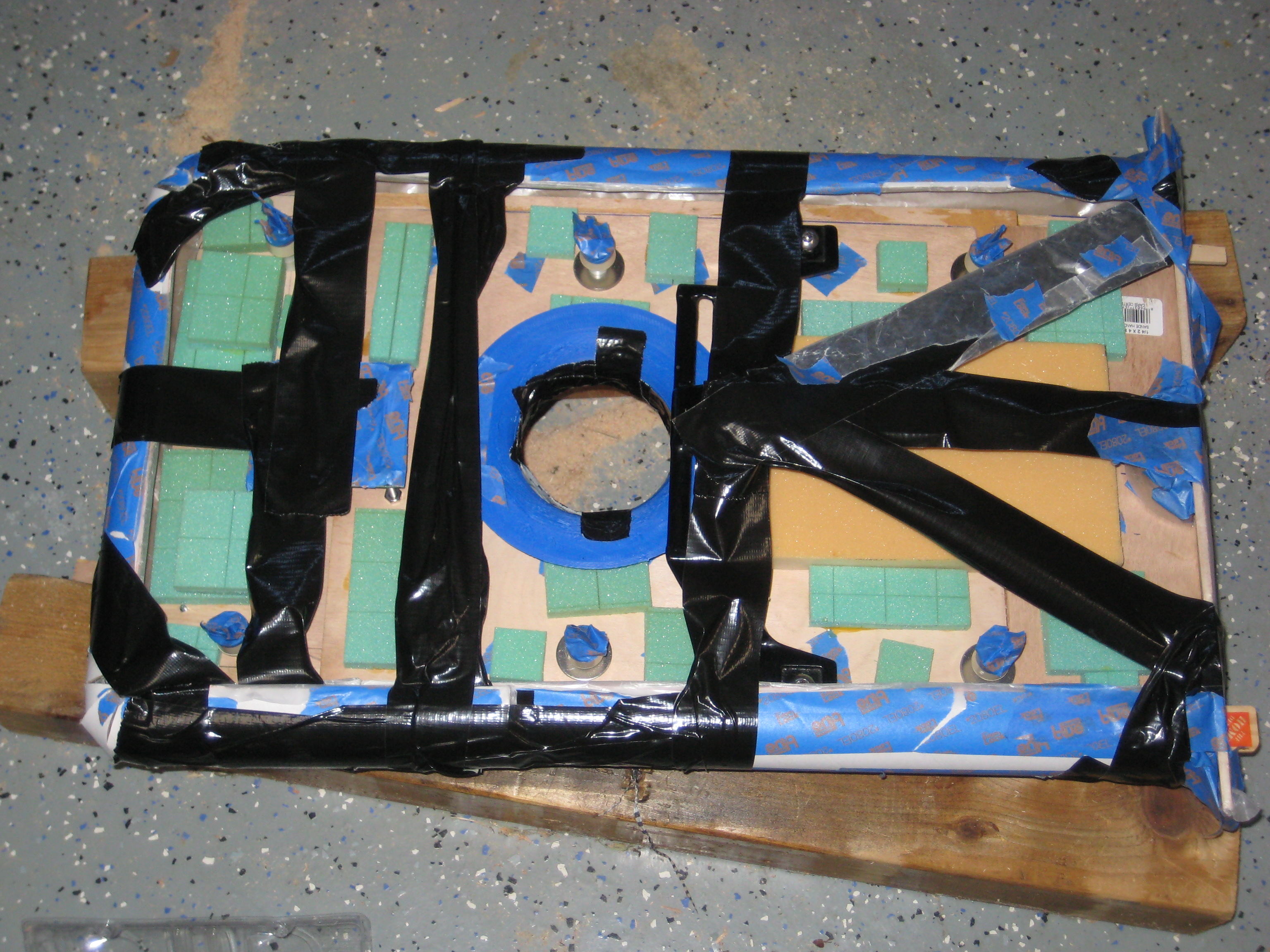
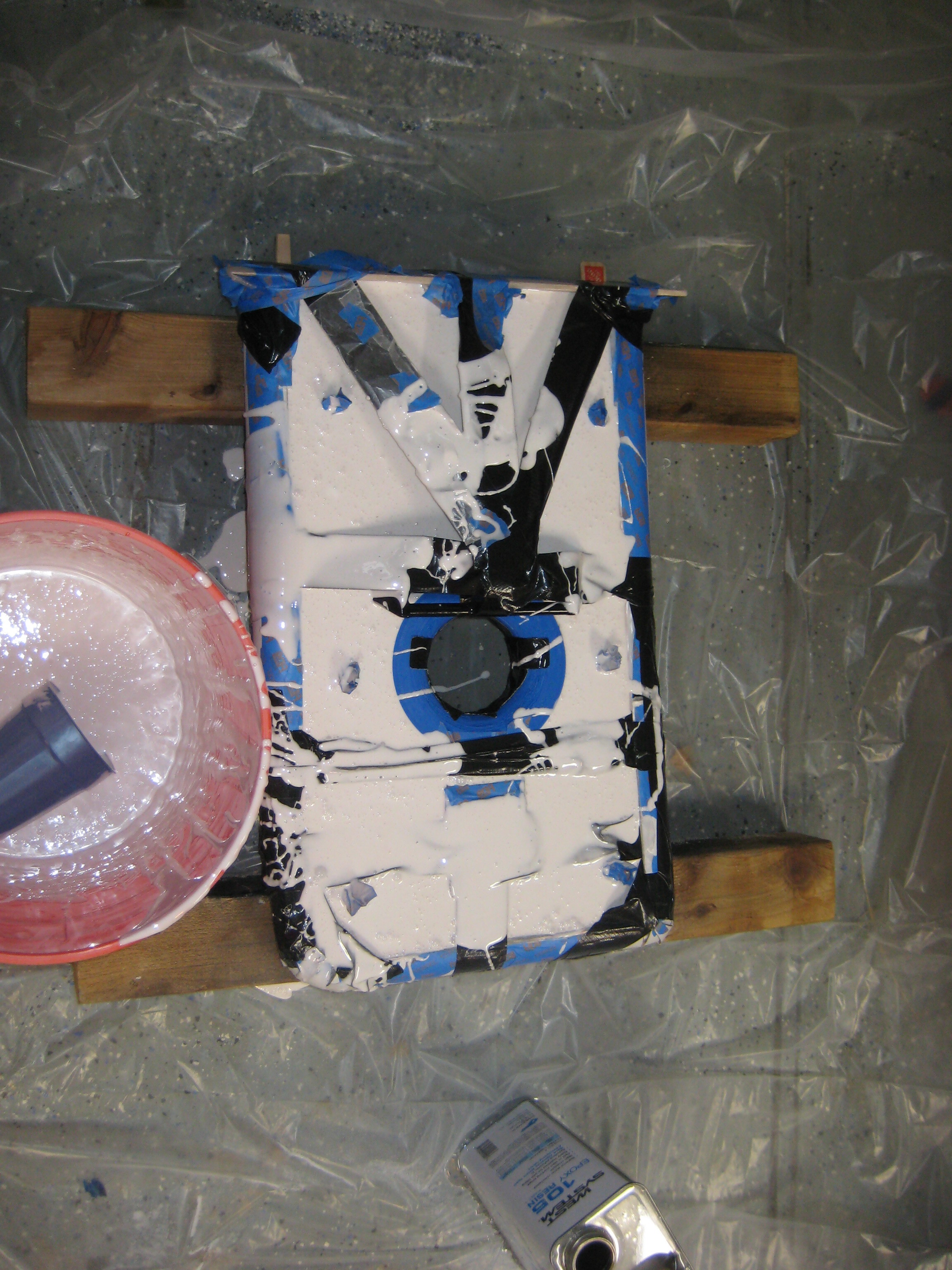
The float is going to consist of those two plywood platforms, with a secondary layer joining them together, then covered with closed cell structural composite aircraft foam (dyvinicel? sp) and glassed over. I’ll have plenty of room for ballast weights in the bottom if I need it. The top plate will end up being one center thruster mount, and then one rear pod mount suspended under the float between the rails. There will also be two lower cross spars to help support that rear pod.
The endcaps have not been milled yet, but everything looks like it will work out from the printed prototype (which is at the CNC shop) I’m shooting for an initial depth raiting of 300 feet give or take.
All the parts so far are printed at 100% infil, ABS.Eventually the entire thing will likely get painted to protect the aluminum from corrosion. The whole thing is going to weigh about 30 pounds when done, with at least half of that being battery weight. It’s getting there!
One of the rear side panels completed. That’s the first print with the .5mm nozzle on the Taz. I still have some tuning to go with my .5mm settings, but it turned out ok. Ii plan to eventually paint the whole thing anyways, so i’ll be able to fix the minor surface imperfections at that point.
Next up, the other side panel and then the mount for the rear pressure hull so I can actually attach it to something. Then I’ll print the redesigned top thruster plate and finish the float.
The endcaps for the main pressure tube are currently being manufactured. I should also see the first set of thrusters in February.
Thank you. There has been a minimal amount of post processing so far. Edge trimming of the brim, a layer split glued etc. The green stuff seems to print nicer than the blue filament for some reason. No idea why though. The blue one did get some repair work done to it. Still need to print it’s counterpart too. Next up are the top structure plates though.
It’s not finished yet. I won’t even have the thrusters until February. I’m still working on the float and the pressure hull. The printed parts were printed at 100% infill, and should not have any major air voids. The depths I’ll be able to reach at first will not exceed about 150 meters just because I can’t afford better pressure hulls at this point (something rated for deeper depths would start at around $1,000)
I’m currently working on the pressure hull endcaps. Once those are done and tested I can start installing the electronics and take it for a spin. I also have the materials to make my syntactic foam float. I just need the temperature to warm up a bit so I can pour that and let it set.
Finally have a pressure hull for the front. It’s starting to look more like a ROV. The thrusters should be here any day now. I still have the side of the pressure hull mounts to print, the front hull retention brackets, the inner electronics structural plates, and then making the syntactic foam floaty thing
It’s getting there though. Plus it kind of has a robot arm now too.
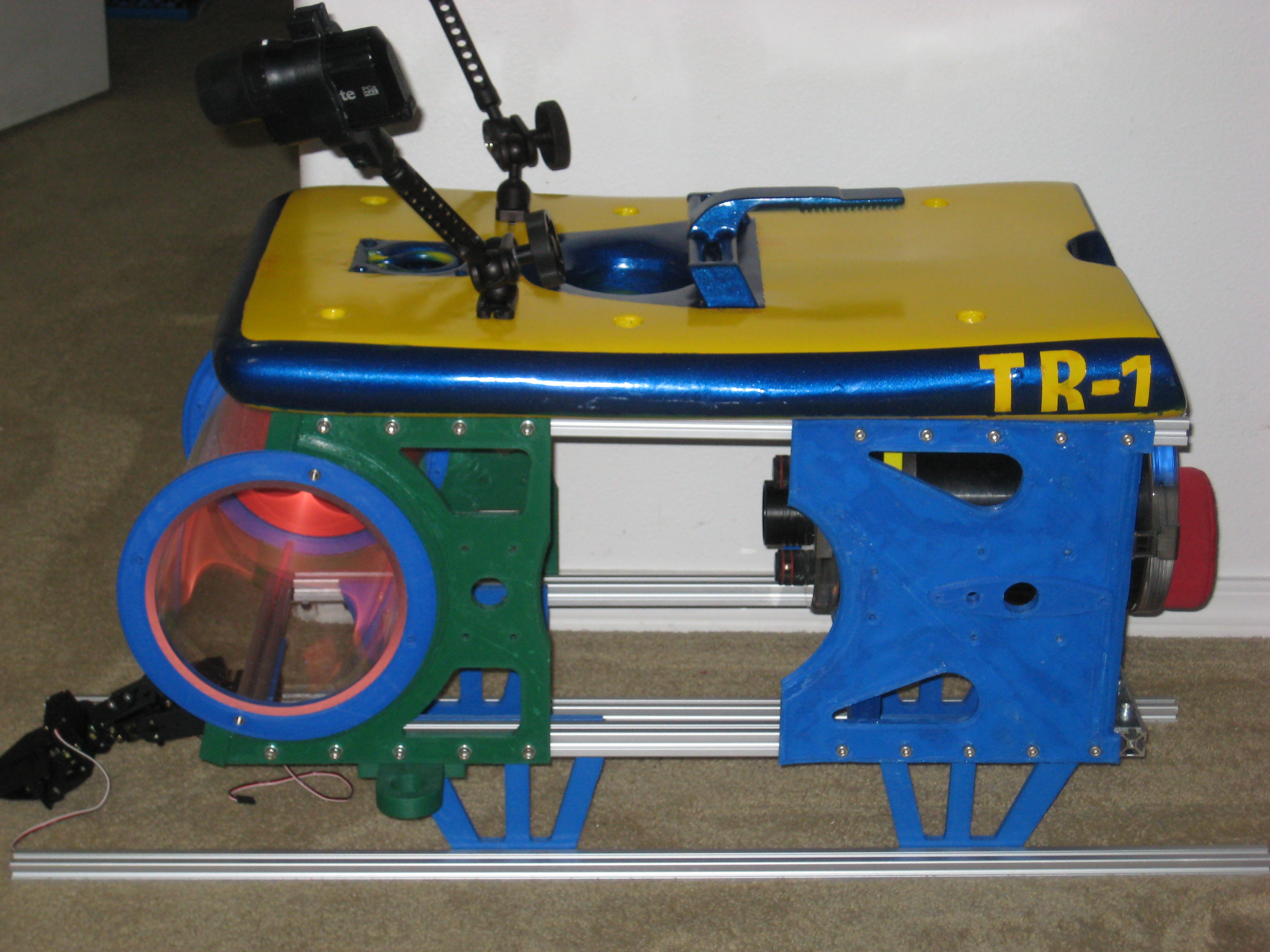
First look at the ROV Float assembly. It’s moist of the way done, I still need to do some clean up and filling in the middle, painting, etc. Eventually the float will be yellow on top with blue edges, and the 3d printed parts of the ROV will mainly end up blue. Now that this is where its at least usable, I can concentrate on finishing the rest of the ROV frame and the electrical bits. The Thruster ship date has been pushed back somewhat, so I don’t have them yet, but I do have the camera, controller and other electronics ready to go. Next design work will be the internal structure of the front pressure hull (camera tilt mount, etc. )
Here’s the painted float with the new light bracket arms. 3d printed the adaptor for the little Ikelite units. I’m working on the internal pressure hull structure now, but that’s not quite done.