My Taz has a very tiny, but noticible in light, Z wobble. This is a part that attempts to remove that Z wobble by converting the 4 3mm heat set insert mount holes into passthrough bearing surfaces. The theory is that the new part will ride on 4 25mm long nylon M3 standoffs and allow the leadscrew to only influence the up and down motion of the axis. Dunno if it’s going to work or be usefull. I’m printing it now, so we’ll see!
Znut.stl (269 KB)
…
Printed fine, haven’t got it bolted up yet because I need some additional spacers for the other side. Looks like it should work though. My main concern is the spacers might not provide a good enough glide surface. Some graphite powder should take care of that possibly.
Have you thought about ball screws for the Z axis. In a 1605 x 300 mm size they are fairly in-expensize, unlike getting 8mm ones, These would be a lot less likely to bend, but I think would need nema 23 motors to drive them. I’m going to try this I think becasue most of my prints either fail entirely, or have obvious missed Z steps. I rarely see an X / Y missed step, but a 47mm print was only 312mm tall  The problem was reduced by lossening a few screws, but I think you will find that objectionable, too. Bolts / Nuts should be tight, spacers should be used where movement is desired. I’m going to make a new post describing my efforts to get a good Z axis print, which I have band-aided for now with software.
The problem was reduced by lossening a few screws, but I think you will find that objectionable, too. Bolts / Nuts should be tight, spacers should be used where movement is desired. I’m going to make a new post describing my efforts to get a good Z axis print, which I have band-aided for now with software.
Any thoughts?
I’ve installed ballscrews on an ao- 10x http://www.thingiverse.com/thing:547327 which was the precursor to the taz. They work well. I don’t know that they are going to be a major upgrade over the existing leadscrew in this application though. The biggest remaining issue with the taz (which in its own right is a fairly minor issue) is the minor z banding. You can bairly see it on my machine but it is still there, and on my taz at least is almost certainly due to the z bushing to rod gap. I just finished the other anti wobble nut, but it might not be very effective at all until I fix the constraining z rod issue. Parts for that project don’t get here until next week though heh. If that project doesn’t do the trick belts or a ballscrews will be on the list to try. A nema 17 motor will turn one of the 1605 ballscrews just fine though.
I keep getting missed steps on the Z axis and the only thing left is to increase the torque, or reduce the friction. What length ball screws should i order? 250 mm stroke, 300 mm total length, etc. Until I can work out feedback positioning I may just add the NEMA 23’s, since that seems like a simple project.
The mitsumi leadscrews have an overall length of 420mm. There isn’t a whole lot of room to put anything larger than the 12mm wide leadscrew in that particular spot without a major reconfigure. In particular the larger ballscrew nut is going to be hard to fit. Its probably doable if you move the linear rod outward.
I’ll let ya know tomorrow. Got in a pair of 84 oz/in NEMA 17s today and so far they miss far less the the 56 oz/in stock steppers. As part of the upgrade I think I want to convert the X carriage to horizontal. It just makes sense to distribute the weight instead of hanging it off the back. Eventually I’ll use a very minimal X carriage, probably just holding a Kraken hot end. next is locating some kind of slippery tubing much closer to 3mm then 4mm PTFE, and water cooling the hotend because a bowden setup needs more retract (I refuse to call it suck).
I also got some new 3/8s PEI and manage to need dynamite to blast off a big flat ABS plate extruded at 250 degeees.
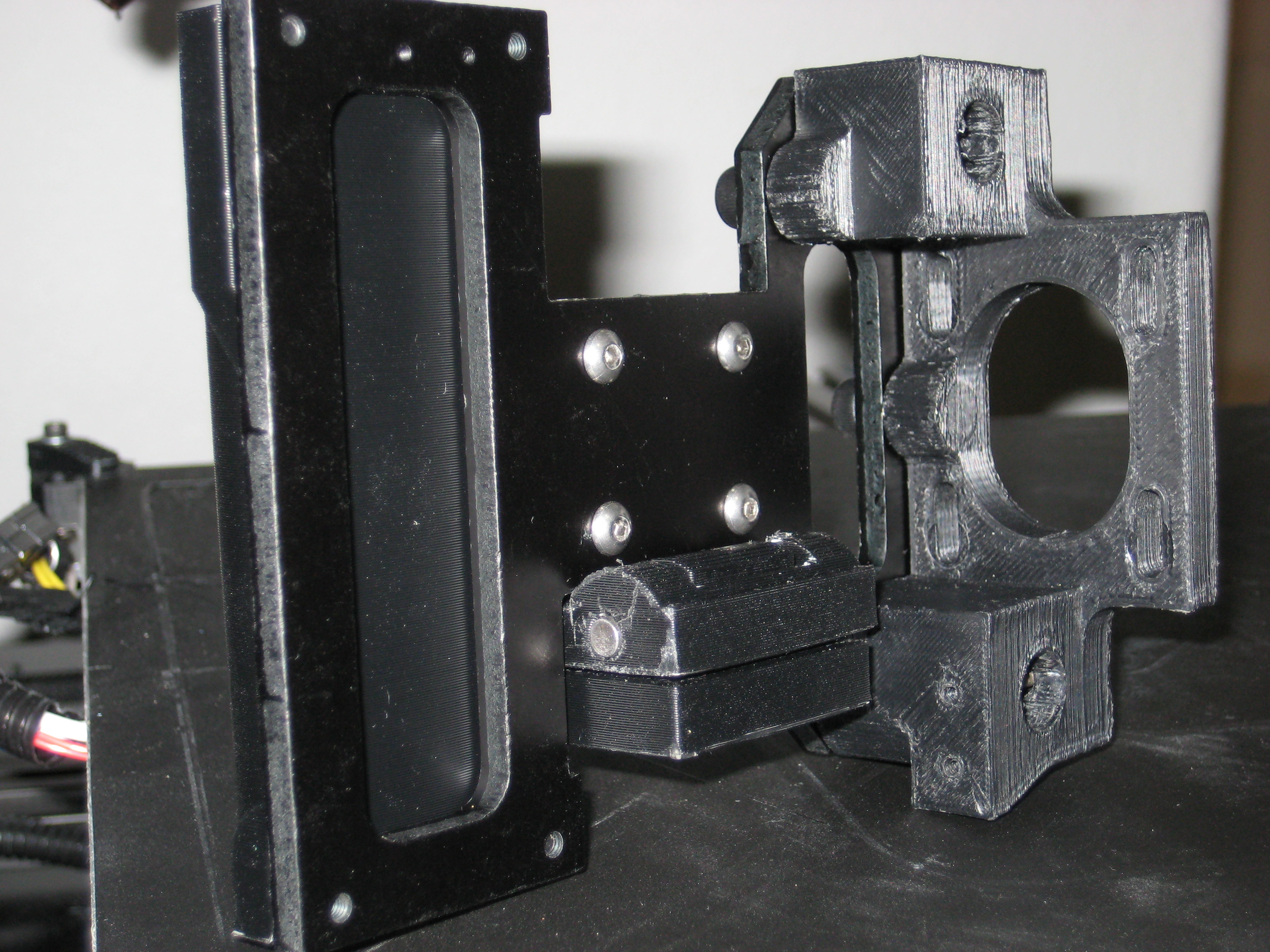
I finally got this bolted on to my machine, and it works great. I used threaded spacers and 8-32 bolts to provide a glide surface off the two side plates. What I discovered is that it reduces the Z wobble to absolutly Zero… in the X direction. It does nothing to address the Y wobble, which is also present. So, i created a second version to test that had Oval shaped slots. That lessens, but not quite eliminates the Y wobble, but I introduce another issue where the nut is actually able to turn on the pins, causing a slight Z layer height error, and enabling the nut to turn in such a way that it binds, restoring the Y wobble. Which is admittedly very small. Springs on the pins might do the trick, but I think thats going to force the X wobble back into place. So, more radical action is required.

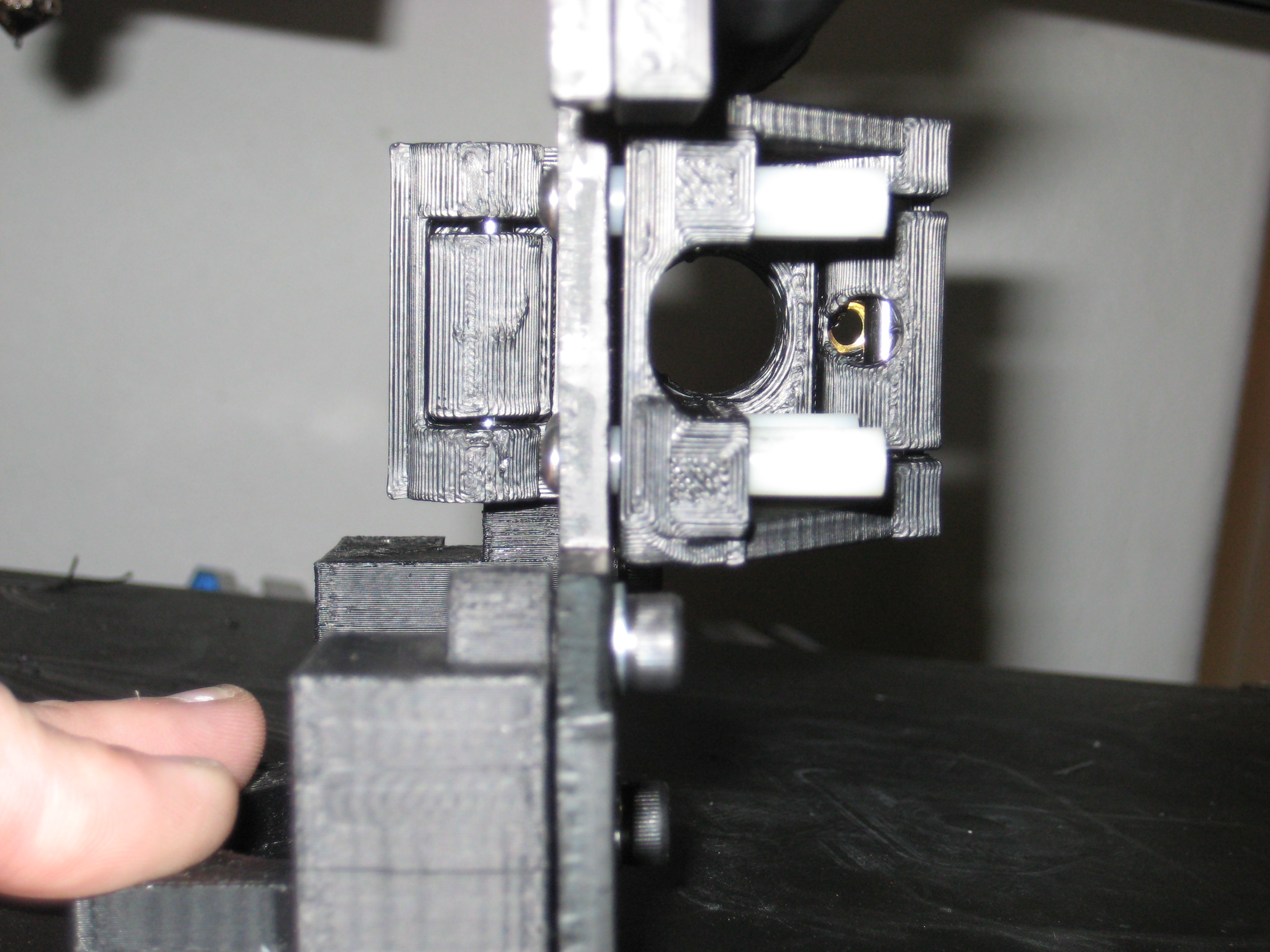
With the current configuration, I have a total of 12mm I can potentially play with before the bottom of the nut could potentially impact the Z carriage with the Z adjustment endstop target thingy spring/bolt removed. In reality i can probably go another 5mm beyond that and never have a problem, but I’m trying to keep things as compact as possible. So, what I am toying with if I can make it fit and make it robust enough, is a Y rod slider system made out of 4.75mm hardened steel pins (that you can apperently just buy! I’ve been making them for years and I hate making pins! i’m really excited about that in case anyone was wondering). There will be one pin in front, and one pin behind the leadscrew, and the leadscrew mount iself will be on the lower section, which will be able to slide back and forth in the Y direction. The X sliding mechanism and pins seems to work quite well, so i am going to largely leave that alone. I’ll probably extend the pin socket to improve wear life a little, and the sideplates will change quite a bit to accomodate the lower section.
The weight of the X axis will partially be supported by the Z bearings, and will mainly rest on the Z nut itself. There will be a potential failure point at the edges of the upper nut holder frame where the pins intersect with the sidewalls, which is of concern. I can’t go very much wider in that spot due to the other pieces there, especially the Z bearing block. I can probably fit a larger pin in the outer pin hole, but the inner one will actually end up extedning under the side plate itself. I just can’t get a bigger pin in there unless I take some of that 5mm space I mentioned above, and even then i’m not sure I can get enough thickness on the glide section for that side. So, thats why I’m posting this unfinished picture. If anyone has any ideas, please let me know. I can go up quite a ways, so 2 outboard pins stacked on top of each other is an option, or potentially a 3 pin setup.
To be continued!
Looking at this again in the morning, there may be a simpler and stronger way to do this. Instead of pins, I can use M3 screws pointing down riding in channels on top of washers, with spacers to set the depth. That eliminates the risk of a tab breaking, so I’m kind of liking that idea more at the moment if I can fit it in there. Which is kind of a shame because I alreadyy bought 4o pins of different sizes.
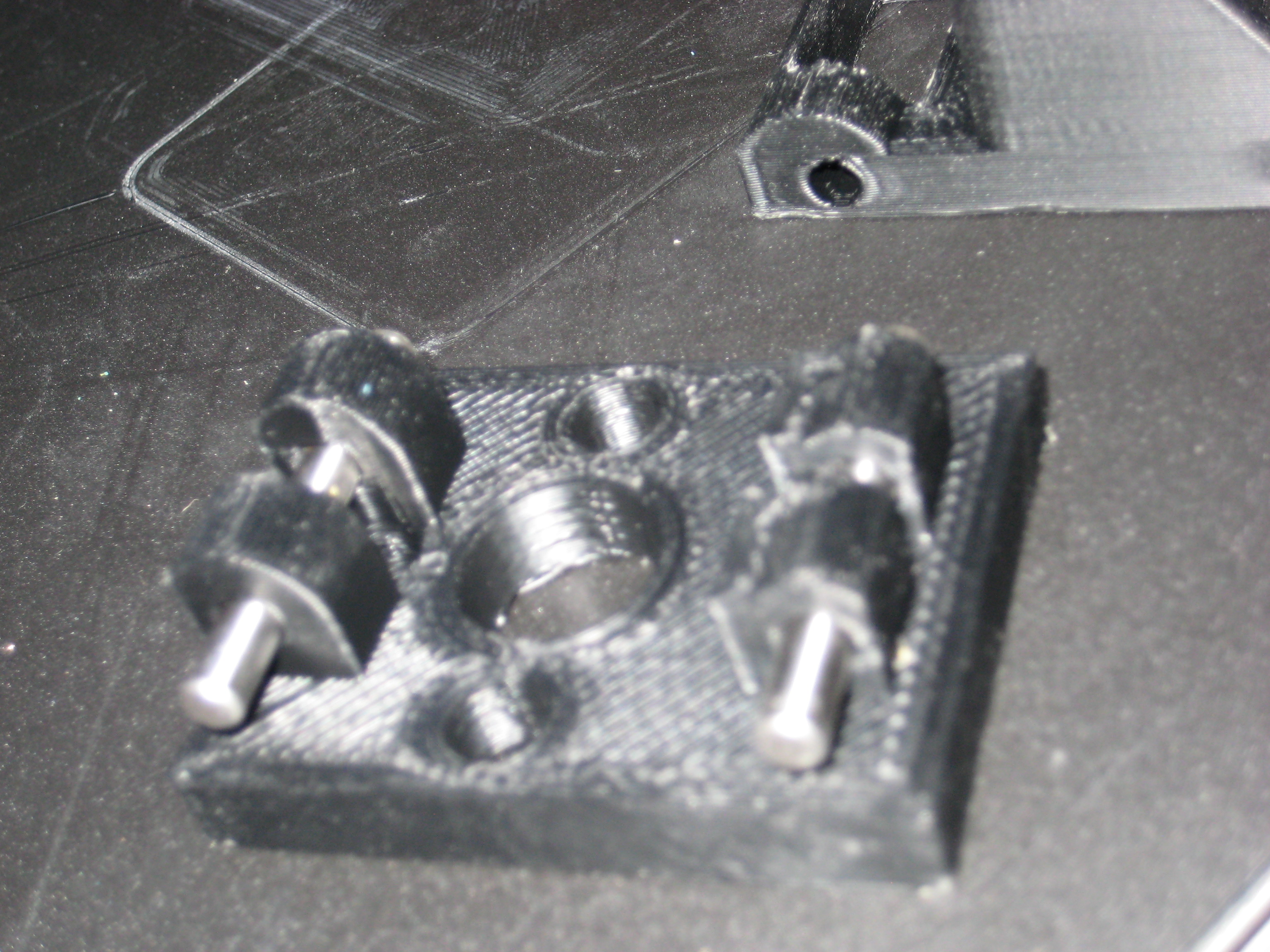
Ok, here’s what I have came up with so far:



This will be a 2 part slider. The channels in the top of the bottom segment and bottom of the top segment will hold ball bearings, at least 4 total, probably a few more. The M3 screws in the end and in the top will be tightened ontube sleeves to allow just enough side to side motion, but no up and down motion. I don’t have enough room to put those M 3 screws in the same plane on both sides, but it should still be fine. The bearings should ensure no tourque misallignment. The assembly with the bearings can be put together outside of the Taz frame in theory, and installed with the leadscrew, so I think the potential for loose ball bearings is an acceptable tradeoff. once this is properly assembled, i don’t see it needing to come apart at that join on the machine frame, and unlike the potential pin design, this is mainly 2 flat plates coming together, rather than small tabs on either end so it should be stronger. I still need to reinforce the upper tower section since I removed the curved walls of the origional part, and these definitly need some cleanup yet, but they look like a potentially viable part set. The test fit will let me know if I can use these or not. The X portion of the upper pin section works very well. I have absolutly zero detectible X offset now, so that should carry over to this iteration nicely.
The available expansion space for this part is reeeeely reeely tight. There are constraints on all sides of the theoretical expansion box that must be respected if it is to stay a Taz. My goal is that this will fit a stock Taz 4 or 5.
Anti Wobble Znut prototype.stl (568 KB)
wobble top.stl (331 KB)
wobble_bottomt.stl (231 KB)
I ended up reverting back to the rod design. I can’t make the other one move smoothly enough to work. Here’s revision 3.



You can see how well the existing blue Z wobble suppressor is working in the X direction in the part pictures.
I got a set of stock Taz endplates in the mail today to use in my mockup for this, and I discovered that I neglected to make a portion of this narrow enough to fit. The concept still looks workable and it’s sliding well enough for use, i just need to re engineer the inner portion a bit to make it fit. It looks like I may need to clearance my Z modification blocks to fit as well, but they have plenty of material in the area i’ll need to clear out so that shouldn’t be a concern. I still need to find another leadscrew and nut though to fully test everything, and print another set of side pieces. It’s getting there though!
Ok, i’m up to prototype #5 now, and i’ve finally got a unit that feels solid, moves corectly, and most importantly, should actually fit. The main difference from previous version is the bit that protrudes under the metal endplate into the build volume area is narrower. I had to take a little from the rod mount sides, but they seem solid enough. the lower section was mostly just nonstructureal plastic anyways. I can actually remove a bit more if I need to from there. This revision should fit with the stock Z bearing block. I am going to need to modify my Openbuilds Z carriage slightly to make it fit, but it will only be 1mm, so it shouldn’t affect stability much.

Anti Wobble Znut 5 bottom.stl (240 KB)
Anti Wobble Znut5.stl (278 KB)
So, the madness continues. that design works, and it seems to work well, but it’s really really really easy to overdrill the bearing hole. Sooo, I’m going to try using these instead: http://www.mcmaster.com/#3378a113/=z8smdn
They aren’t inexpensive, a full set of 8 (4 per nut) is going to run $58. And i don’t even know if they are going to work well yet. but I think it should be a better surface, and easier to install and print than the other type. The main concern I have now is the installation. I’m thinking it will end up being a glue insert, which runs the risk of surface contamination, but thats the only way I can think of to strengthen the immidiate surrounding area without making it bigger. I can go wider on the inboard side if necessary, but the outboard side is kind of at a hard “i’ll hit important things” limit if I make it any longer and the leadscrew itself is in the way the other direction. It’s a very tight box to try and fit things into. If they do end up working out though, I can see a similar setup to ridde on the pins for the upper section, though that one is easier to get working.
so it will be a couple more days until I get the parts here. Once I have those I should be set to print the final test variant (which will be up to revision 6 by then. This might be a new record heh.)
Argh. The bushings with the 3/16" ID hole don’t fit my 3/16" shafts. So yeah, don’t buy those. Every other possible type of bushing to fit a 3/16" shaft has now been ordered and should get here eventually. So, we’re still in a holding pattern. I might switch back over to the sensors for a bit, but I really want to finish this one before I print anything major.
Replacement bushings arrived. I’m using 8 Igus 2MTRI MYI-03-03 Flanged Bearing, 3/16 IDx3/16 In L split ring bushings. they seem to work well so far, but I either need to make the cups tighter, or glue them in place. Here is the newest revision of the files. These will fit in the stock area, or with my Z modifications, except for one tiny detail. The Z bearing itself. I’m probably going to have to make an alternate Stox Double Z bushing holder for anyone who wants to use this with the stock hardware, and modify my Z carriage on my openbuild extrusion piece in order to make everything fit. I can’t take any more material in that particular location without weakening the actual nut mount interface. look for those soon.
Anti wobble z nut bottom 8_4b.stl (295 KB)
Anti Wobble Znut top 6_1b.stl (278 KB)
Here’s the clearanced Double bearing holder for use with the Anti Wobble Z nut holder. The removed material wasn’t really doing much in that particular location anyways, so it should be just as strong as the stock unit.
double bearing holder clearanced for Anti wobble.stl (631 KB)
Last modification to the bottom section. This has the retention groves for the Igus bearings, as well as additional clearance to account for the washer AND the bolt that holds the stock X motor mount or Idler mount in place on the plate.
To insert the igus split ring bushings, you basically stick them in the grove just like you would a split retainer ring, then use the metal rod to seat the bushing inside its track well. The thing works well now, it fits, more importantly it fits within the confines of the stock TAZ 4/5 chassis. I officially declare the parts completeded and ready for use. I’ll have additional pictures and video, as well as assembly instructions and a thingiverse project link up sometime by this weekend. If you are using my Z rail setup, you will need the modified Z bearing carriage, which has yet to start existing, but anyone with a stock TAZ should be good to proceed.
I think this particular assembly has the honor of being the most frustrating part to get right I have attempted so far. Seriously, the ROV camera swingarm plates were easier than this one.
But, It should totally be worth it.
Next up I need to convince myself to buy that $260 set of zero backlash spring assist leadscrew nuts to go with it.
Anti wobble z nut bottom 8_6b.stl (360 KB)
Here is the published thing: http://www.thingiverse.com/thing:1089626
And a video http://youtu.be/yokdL-T7lW4
Also a bunch of pictures