Hey 3D printing Folks,
I wanted to share my experiences with Z-wobble on the TAZ 5 with you, what the cause is, and how to fix it. I am Dutch, so I will try my best to explain it in English. I experienced major Z-wobble on my TAZ from the beginning. It was really annoying since I also have 3 Ultimakers which don’t have this problem at all. But as I have an education in mechanical engineering, I found a solution to this.
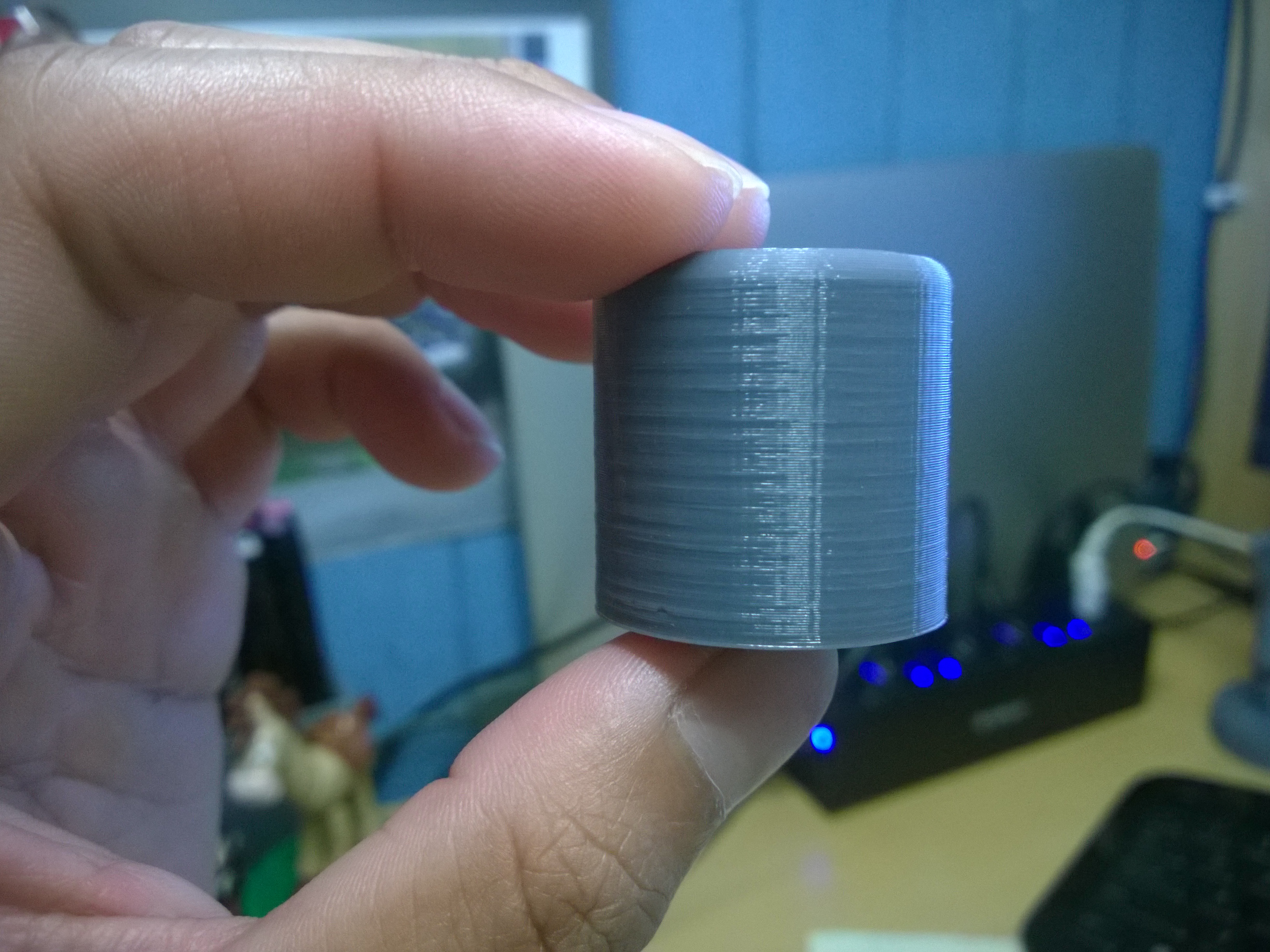
At first I checked what the pattern of the Z-wobble was by printing tall cilinder shaped objects. I found out the wobble was not really a wavy pattern that happens to certain layers, but the pattern was a spiraling effect. I found out the pitch of this spiraling effect was identical to the pitch of the threaded rods. So this got me thinking…
As you may know, the TAZ 5 has two threaded rods which move the X-carriage up and down. The threaded rods are the cause of the Z-wobble, and here’s why:
Threaded rods do always have a slight bend, this can of course be unnoticeable when this bend is very little. But some rods are bended more than others. Another thing is, the threaded rods in te TAZ 5 are fixed with two ball bearings each, on the very top of the machine and on the bottom, close to the stepper motor. Those ball bearings fix the movement from the rods in X and Y dimensions. But this causes problems to the x-carriage. Remember that the threaded rods are bended, when the stepper motors and rods start turning around, this bend also starts to turn around, like a jumping rope on its side.
Because the threaded rods are fixed in X and Y directions, those bends start to apply forces on the x-carriage. So the whole x-carriage starts to move. And this is why the z-wobble happens. The direction of the force rotates with the threaded rod, so the z-wobble effect also rotates which causes the spiral effect.
The fix:
Since the threaded rods don’t have to be constrained in X and Y direction, you can safely remove all 4 ball bearings on top and bottom. The threaded rods only have to fix (and move by rotating) the X-carriage in Z direction. The X-carriage itself is already fixed in X an Y directions with the smooth Z-rods and linear bushings. As you remove those ball bearings, the threaded rods are able to move a tiny bit in X and Y directions which compensates the bend of the threaded rods. The flexible couplings that connects the stepper motors with the threaded rods also allows them to move slightly. Because the threaded rods are now allowed to move a little bit, they won’t apply forces on the X-carriage anymore, and the Z-wobble disappears.
I also switched the linear bushings for linear bearings (LM10UU) since the bushings had way to much play. This also made the prints look even better.
Long story short: if you have a TAZ5 (or maybe an older version?), you can easily fix the Z-wobble by removing all 4 ball bearings on top and bottom of the threaded rods. 
Cheers,
Sven van Dam
@umakeprinting