Under every bridge, road, intersection, building, in fact pretty much any large manmade structure, you will find drainage tubing. They go by many names, culverts, drain pipe, conduit, etc. but what they all boil down to is various types of tubing. With the drain tubing especially, you need a way to know that water will go where you think it will go, when you think it will go there. And that requires inspections.
Most people are too tiny to fit in a 12" tube, and it’s not practical to dig up a 500’ long section of culvert every time you want to see if it has a leak, so people tend to send robots inside instead. This is the current least cost tube inspection robot out there: http://www.robotshop.com/en/treaded-pipe-duct-inspection-robot-tethered-controller.html
It costs $10,000.
I think I can do better. Or at least cheaper.
My dad is a retired Civil engineer, so he can theoretically use such a robot to inspect a culvert, and then give a professionally valid opinion as to the state of the culvert. He can probably charge someone $150 to $300 an hour to do so in theory with a reasonable chance of a someone wanting to use those services 2-3 times per month during the summer months. I figure I can build a robot using ROV pressure hulls and controllers, 500’ of Cat 6 network cable, a spare laptop and some other hardware bits for under $1k not counting the laptop.
I ended up with an old robot chassis with 4 good motors in it, so I’m designing the unit around those motors. I want something that is a great photography platform, that will have a good stable footing in potentially slimey pipe, will not ever need to travel fast, and can travel over congregated surfaces. it doesn’t need to be able to turn much at all, it will mainly be going slowly forward or backwards.
This gives you hopefully a better idea of what I am going for. There will be 4 independant suspension arms, each containing their own motor. To save on space, the motors have been rotated 90 degrees away from the shaft via gears. The gears I am using are differential gears from a Traxxas slash 4x4 RC car, and if i were worried about high speeds, I would probably be concerned about the size. As it is though, these will never go very fast so i am not worried about the teeth. I still need to draw the shock towers and the sway bar mounts, but each wheel will have its own shock, as well as swaybars front and back. The current plan is to have 2 more flat plate sections with the shock tower upper mounts built in, and then a 4" diameter tube on top of that.
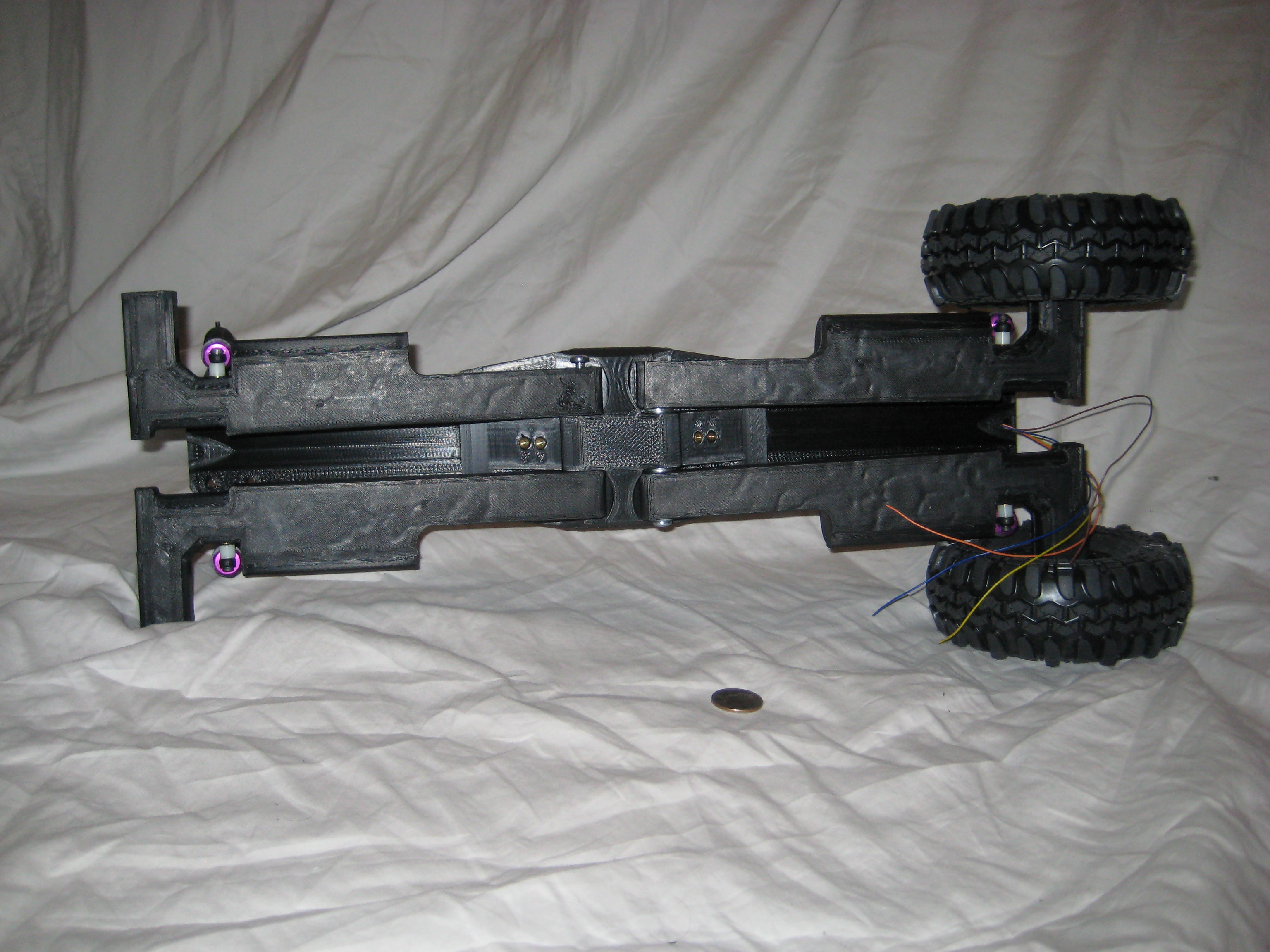
I got the suspension geometry and moving bits mostly worked out. I’m still missing a few important things like pivot bearings and long enough bolts and most of the rear components. but there is enough there to make me feel that I have a decent chance of the suspension working. The shock towers may actually be a bit too tall with the unit equipped with its full payload, but aside from that it seems to work. Next I need to make a sway bar jig, and then a mount for it. The rear section is going to be pretty much identical to the front at that level. There will be a structure in the middle of some sort, which either anchors the tube, or anchors a flatter waterproof structure of some sort. As you can see from the Taz bed this thing is big enough I might just use it as a skate board if nothing else.
More progress. i ran out of heat set inserts. And bearings. And long enough bolts since the ones I picked up that were supposed to be 4" long aren’t. But you get the general idea of where I am going. The rear wheels are apparently back ordered, but thats ok because I don’t have the wheel hub bearings yet anyways.
Next step will be the upper hull. It’s either going to be a long tube, or a flat box. I’m leaning towards a box just for clearance, but I’m not sure I can find a premade one that long, and I can’t 3d print it in one go. I may have to print it in sections, glue it, seal it, then figure out a front camera setup. I need to fit 2 control boards, a tether interface board. and the camera assembly in the top box. I’m thinking the batteries will end up in side mounted tubes, one per side.
It is currently printed in ABS, specifically Push Plastics Black ABS in this instance. PLA would probably also work fine for this application. I think i’m going to make some “battery pods” next, maybe out of Blue ABS for contrast?